画像クレジット: Lottie animation by Centre Robotics (LottieFiles Free, used with credit). · source
Why do robots still fail at tasks they've technically been trained to do?
I've been asking this question for months, and honestly, the answers I usually get feel incomplete. "Distribution shift" is the technical term, which basically means: the real world doesn't look like the training data. Your robot learned to pick up cups in a lab with perfect lighting, and now it's confused by your kitchen's weird shadows.
But here's what's interesting. Two papers dropped recently that approach this problem from a direction I initially dismissed, and I think I was wrong to do so.
Both TTT-VLA and MPCoT are tackling what researchers call "test-time" improvement. Translation: making robots smarter after you've deployed them, using data from their actual environment.
TTT-VLA takes a surprisingly elegant approach. Instead of retraining the whole policy (which would be expensive and risky), it optimizes just a "latent prompt", basically a small learned signal that steers the robot's behavior. The robot collects interaction data from wherever it's deployed, then tweaks this prompt using a self-supervised signal. The policy itself stays frozen.
What caught my attention was this finding: the gains come primarily from correcting a small number of critical decisions rather than globally altering policy behavior. So it's not making the robot universally better. It's catching the moments where the robot would have made a catastrophic error and fixing those specifically.
関連記事
More in AI Models
Jensen Huang confirms Samsung, SK Hynix, and Micron are all certified for next-gen memory supply, which tells us more about the AI chip market than the chips themselves.
Aisha Patel · 58 mins ago · 6 min
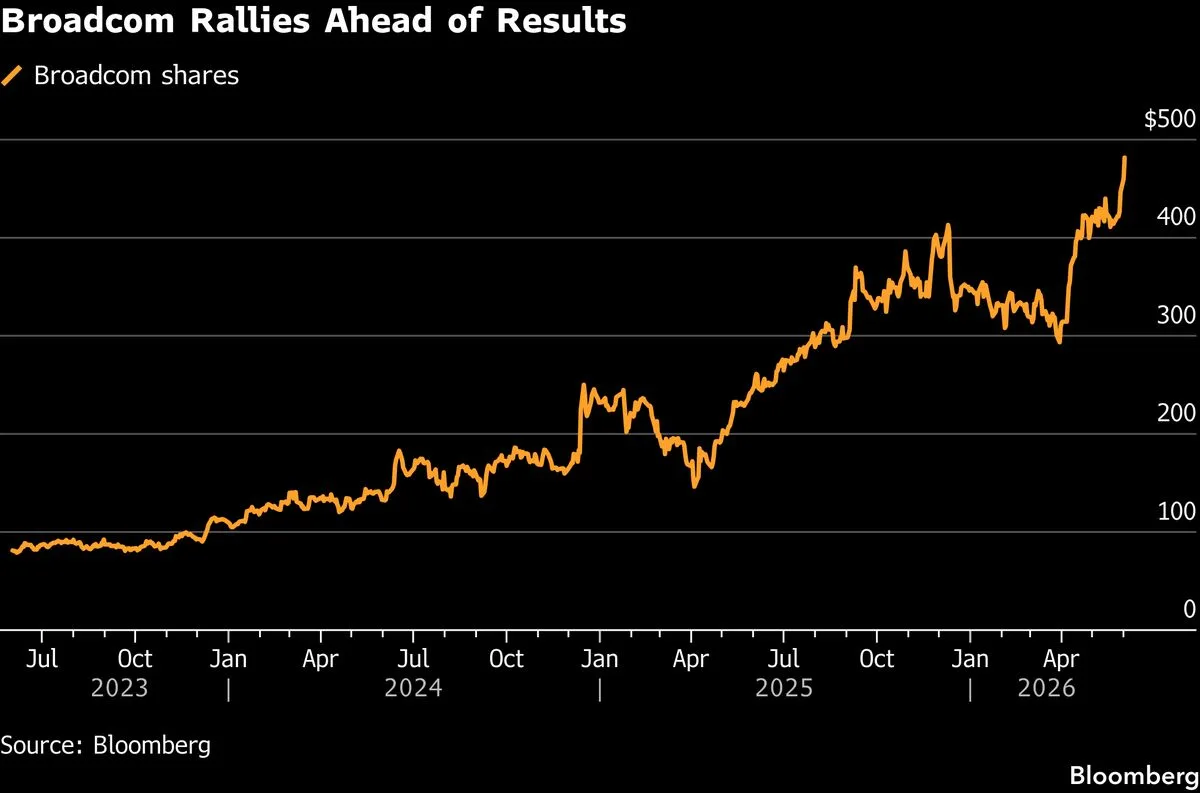
A $1.6 billion shortfall in projected AI chip revenue sounds small, but it tells us something important about where the semiconductor industry actually stands.
Aisha Patel · 58 mins ago · 8 min
Jensen Huang is making moves on two fronts this week, and I've seen this playbook before.
Mark Kowalski · 2 hours ago · 7 min
A batch of new reinforcement learning papers suggests we're getting closer to robots that train themselves, but the real test is whether any of this works outside the lab.
I should know this better, but I'm not entirely sure why that's happening. My guess is that most of what a well-trained VLA does is already correct, and the distribution shift only breaks specific edge cases. If that's true, this surgical approach makes a lot of sense.
The second paper, MPCoT, does something different but related. You might be wondering: if chain-of-thought reasoning works so well for language models, why not have robots "think out loud" before acting?
The problem is latency. Robots can't pause for 500 milliseconds to generate reasoning tokens while a glass is falling off a table. MPCoT's solution is latent reasoning, basically doing the chain-of-thought process in the model's hidden states rather than as actual text tokens.
Here's how it works: the system initializes multiple hypotheses (they call them M paths), refines them through K steps, then aggregates them before deciding on an action. A reward signal during training teaches the model which reasoning paths lead to good outcomes.
The clever bit? Zero reasoning tokens generated at inference time. The 8-step action interface stays identical. You just get a robot that's doing more internal deliberation before committing to a move.
On LIBERO and CALVIN benchmarks (which test long-horizon manipulation tasks), this apparently improves performance. I say "apparently" because I haven't seen independent replications yet, and benchmark results in robotics are... let's say, historically optimistic.
I think test-time adaptation is going to be one of the defining capabilities that separates useful robots from expensive paperweights. And I don't think enough people are paying attention.
The current paradigm for deploying robots goes something like: train on massive data, hope it generalizes, pray your deployment environment isn't too different from training. When it fails, you either collect more data and retrain (expensive, slow) or you accept the failure mode (dangerous, limits use cases).
Test-time training offers a third path. Deploy the robot, let it adapt to its specific environment, and improve continuously without shipping weights back to some central server.
This matters for a few reasons:
Privacy and data ownership. If my warehouse robot can adapt locally, I don't need to send video of my operations to a cloud provider.
Edge cases at scale. Every deployment environment is weird in its own way. A robot in a hospital kitchen faces different challenges than one in a school cafeteria. Centralized training can't anticipate every variation.
Continuous improvement without downtime. TTT-VLA specifically optimizes a small prompt, not the whole model. That's computationally cheap enough to run on edge hardware.
I'm genuinely excited about this direction, but let me be honest about what we don't know yet.
First, these are simulation results. SimplerEnv, LIBERO, CALVIN. These are good benchmarks, but they're not a hospital or a factory floor. The gap between sim and real remains unclear, and the papers don't address real-world deployment.
Second, safety. If a robot is adapting its behavior at test time, how do we ensure it doesn't adapt in dangerous directions? TTT-VLA keeps the policy frozen and only tweaks the prompt, which seems safer. But MPCoT's multi-path reasoning is harder to audit. What happens when the "reward-guided path scorer" learns to prefer a path that looks good on paper but has subtle failure modes?
Third, the papers don't disclose computational requirements for test-time adaptation. "Computationally cheap" is relative. Cheap enough for a Jetson? Cheap enough for a microcontroller? This matters enormously for practical deployment.
I initially thought test-time training was a niche academic curiosity. Something that would work in papers but never make it to production. After reading these two papers more carefully, I've updated that view.
The TTT-VLA finding about correcting critical decisions specifically (rather than changing everything) suggests this could be deployable in high-stakes settings. You're not fundamentally altering the robot's behavior. You're adding a safety net for the weird edge cases your training data missed.
MPCoT's approach to latent reasoning is also compelling, tbh. The idea that you can get chain-of-thought benefits without chain-of-thought latency feels like it should be obvious in retrospect, but I hadn't seen it done this cleanly before.
What I want to see next: real-world results. Both papers are simulation-only. Someone needs to put TTT-VLA on a physical manipulator in an actual unstructured environment and see if the gains hold. I also want to see failure mode analysis. When does test-time adaptation make things worse?
It's too early to say whether this becomes standard practice or remains a research curiosity. But the direction feels right. Robots that can't adapt to their environment are always going to be limited to controlled settings. Test-time training might be how we finally break out of the lab.